Random Walk
Published:
Consider the classic random walk problem. Let $N$ states be laid out in a row, with the left most state being a terminal state. Consider an agent who, when at a non-terminal state, chooses to move with probability $p$ to the left neighbour and with probability $1-p$ to the right neighbour (or to itself in case of the right-most state). All rewards are 1. Our objective is to estimate the expected return from each state, under the agent’s policy.
MDP definition
State Space
Set of all states, including terminal state, $\mathcal{S}^{+} = \{1,2…,N\}$.
Set of all states, excluding terminal state, $\mathcal{S} = \{2…,N\}$.
Action Space
For all $s\in S$, set of valid actions at $s$,
Reward Structure
For all $s \in \mathcal{S}, \ a \in \mathcal{A}(s)$,
Transition Model
For all $ s \in \mathcal{S}, \ a \in \mathcal{A}(s),s’ \in \mathcal{S}^{+}$,
Agent’s Policy
For all $ s \in \mathcal{S}, \ a \in \mathcal{A}(s)$,
\[\pi_{agent}(s,a) = \mathbb{P}[A_{t}=a |S_{t}=s] = \begin{cases} \text{ if } s = N \ \begin{cases} p \text{ if } a = -1 \\ 1-p \text{ if } a = 0 \end{cases} \\ \text{ if } s \in \mathcal{S}-\{N\} \ \begin{cases} p \text{ if } a = -1 \\ 1-p \text{ if } a = 1 \end{cases} \end{cases} \nonumber\]Objective : Evaluate $v_{\pi_{agent}}$. Assume $N=11, \ p = 0.7, \ \gamma = 1$.
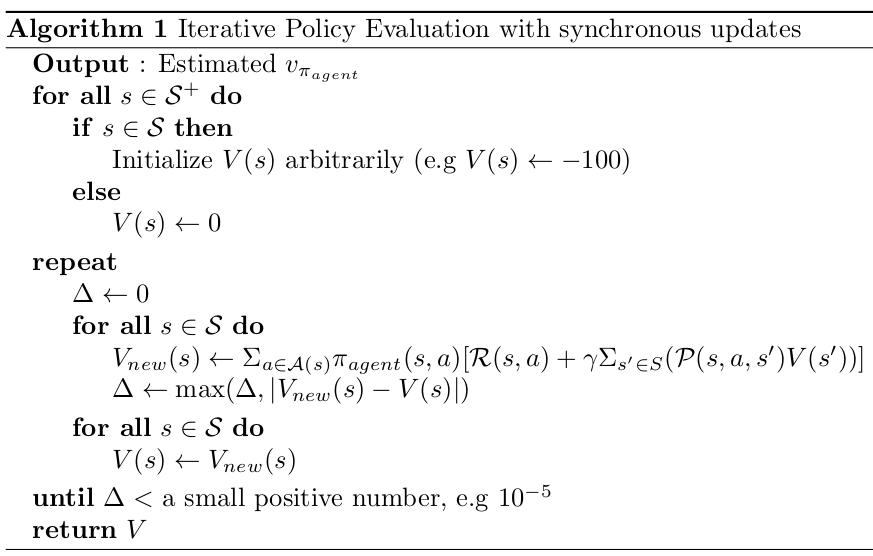
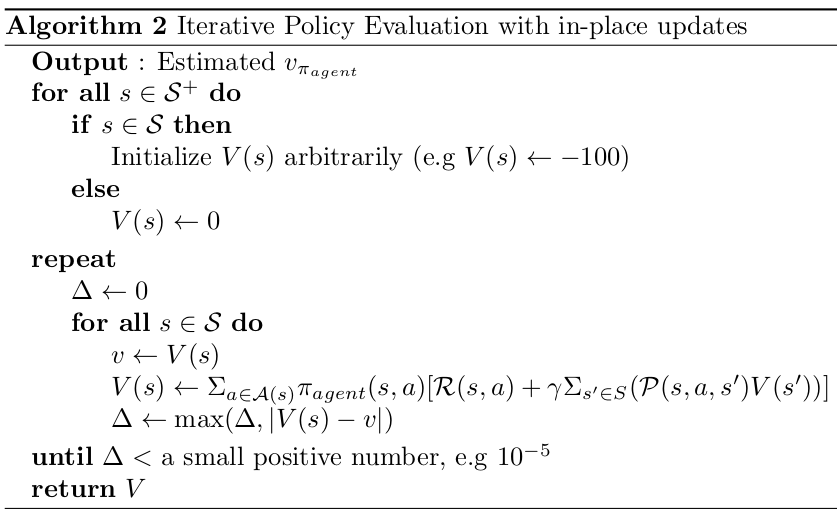
In the solutions to follow, we store the Value function V in a table since the State and Action Spaces are discrete and finite.
Model Based Policy Evaluation

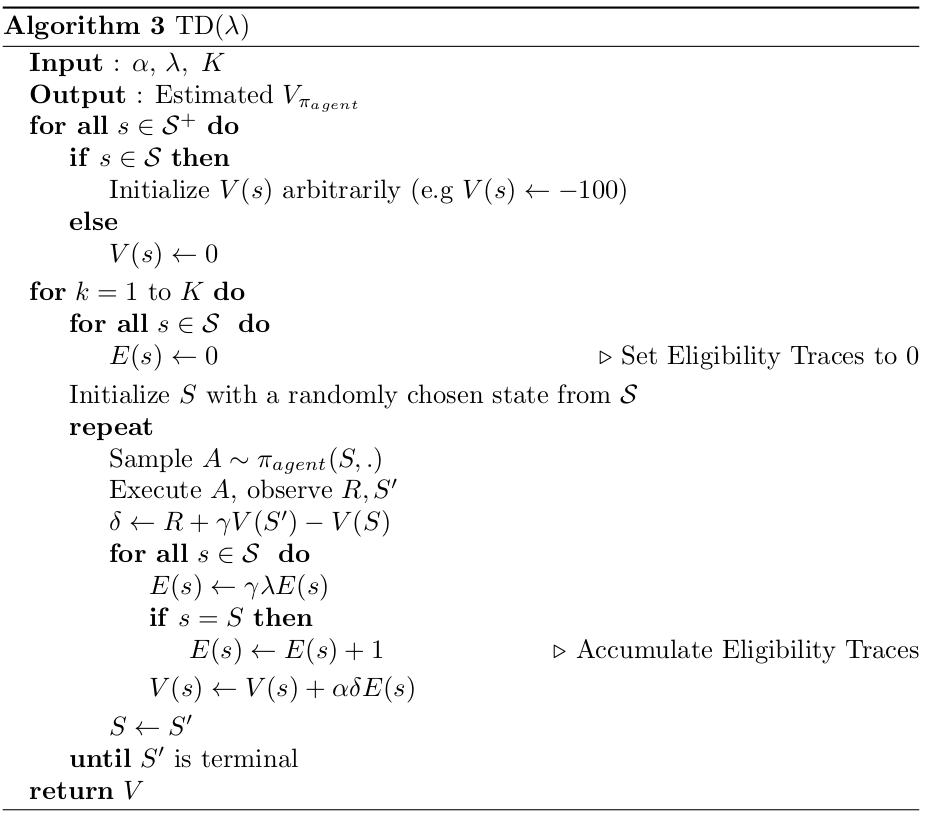
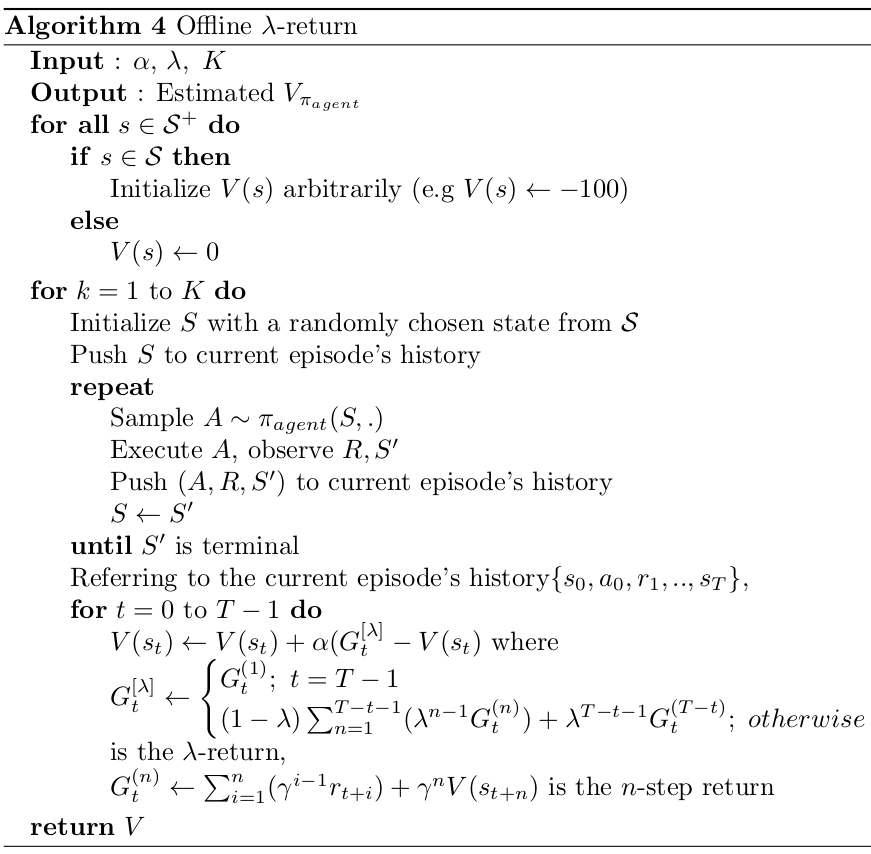
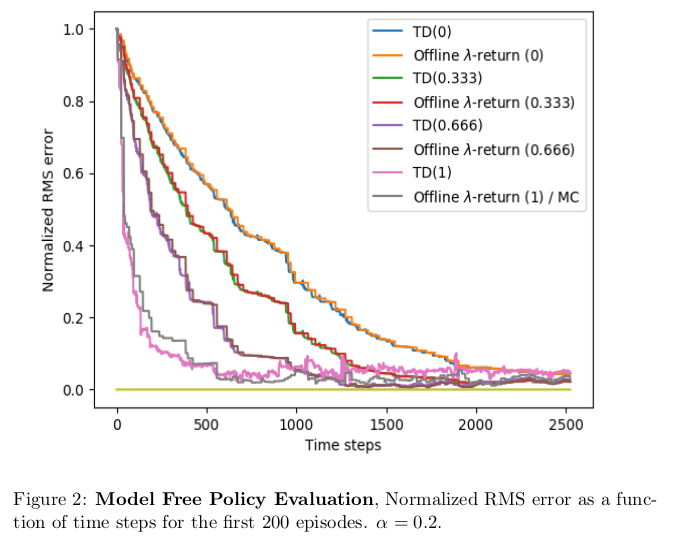
Model Free Policy Evaluation
You can find the code used in these experiments here.